
产品详情
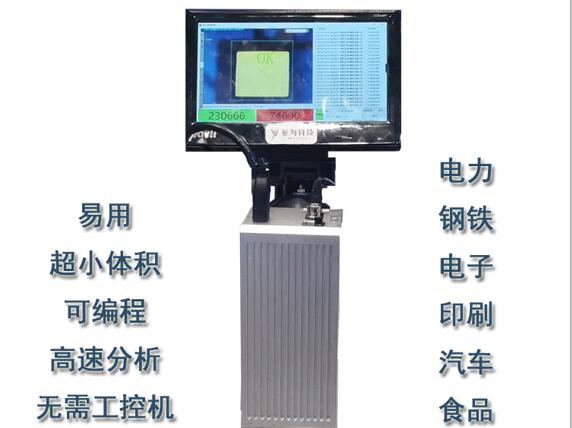
一、系统简介
1、本平台可适应国内外绝大部分的相机。
2、具备测距、动作显示、旋转、描边、放大、FFT分析、颜色识别、颜色增强、几何匹配、字符识别、二维码识别、条形码识别、数据采集、输出控制等功能。
1、LabVIEW及组件安装
2、在运行前先选择相机
3、运行左上角向右的箭头
4、根据提示检查硬件
5、按下Ctrl+E可以查看后台程序,修改后台参数
6、制作exe文件,见“LabVIEW如何制作EXE和SETUP文件”
1、本程序仅供参考,非经亚为授权,不得用于商业用途
2、亚为不对用户修改过的程序负责
3、程序更新,恕不另行通知
4、必须整个压缩包解压缩运行,否则dll文件无法调用
5、软件如有bug,欢迎批评指正
系统功能 | 描述 | 难度级别 | ||
视觉 基础 | 1. | 图像采集 | 图像采集、图片打开、图片存储、录像 | 初级 |
2. | 颜色处理 | 颜色替换与过滤,将过滤点的位置填充目标颜色 | 初级 | |
3. | 局部放大 | 在实时图像中选取要放大的区域,可得到放大后图像 | 初级 | |
4. | 图像裁剪 | 十种ROI将图像按照规定大小裁剪 | 初级 | |
5. | 图像FFT | 得到FFT变换图 | 初级 | |
6. | 图片增强 | 得到增强后的图像(白的更白,黑的更黑) | 中级 | |
7. | 角度调整 | 对实时采集到的图像进行旋转、镜像处理 | 中级 | |
8. | 图片标注 | 在指定坐标位置标注指定文本 | 中级 | |
9. | 图像直方图 | 得到R、G、B三色的直方图 | 中级 | |
10. | 轮廓描边 | 得到实时采集图像的边界扫描图,用于测量轮廓与划痕 | 高级* | |
11. | 图像触发采集 | 通过外触发,高精度定位目标采集区域 | 定制级 | |
12. | 3D相机使用 | 3D相机编程,三维扫描,测距 | 定制级 | |
13. | 线阵相机使用 | 线阵相机数据获取与处理 | 定制级 | |
14. | Halcon交互 | 与Halcon函数库交互编程,实现高效计算 | 定制级 | |
15. | Matlab交互 | 与Matlab函数库交互编程,实现高效计算 | 定制级 | |
目标 测试 | 16. | 图片对比 | 得到两张图片的色差图 | 初级 |
17. | 测距与尺寸 | 目标边缘距离检测,像素转换成长度、角度 | 初级 | |
18. | 颜色识别 | 识别目标区域颜色,可事先学习颜色,亮度测量 | 中级 | |
19. | 条形码识别 | 识别条形码为字符 | 中级 | |
20. | 模式匹配 | 对非规则目标,事先学习模板,高速定位类似对象 | 高级* | |
21. | 边缘跟踪 | 选取要跟踪的区域,可得到边缘跟踪的结果图像 | 高级* | |
22. | 目标计数 | 根据设定范围及形态查找目标并计数 | 高级* | |
23. | 目标跟踪 | 学习目标特征,对动态目标跟踪 | 高级* | |
24. | 二维码识别 | 识别二维码为字符 | 高级* | |
25. | OCR字符识别 | 学习字体库,在实时图像上选取区域,识别字符 | 高级* | |
26. | 3D立体测量 | 三维测量目标轮廓及深度 | 定制级 | |
检测与控制 | 27. | 相机控制 | 对相机的参数和图片的大小进行设置 | 中级 |
28. | 通信控制 | USB(默认)、串口、网口、HID的8IO卡通信,键盘控制 | 高级* | |
29. | 编程扩展 | 逻辑运算、变量赋值、延时、交互 | 定制级 | |
30. | 应用拓展 | 效率统计、表格或数据库记录 | 定制级 | |
31. | 机器人互动 | 与机器人手臂互动 | 定制级 | |
32. | 视觉人工智能 | 视觉人脸识别、体态识别、虹膜识别,加密控制 | 定制级 | |
备注:EVPS2.0基础版(初中级)、EVPS3.0高级版(初中高级),不开放定制版 | ||||




 工商网监
工商网监